

研究概要
堀・藤本研究室では大きく分けて「電気自動車」,「非接触電力伝送システム」,「人間親和型モーションコントロール」,「ナノスケールサーボ」,「パワーエレクトロニクス」,「航空・宇宙機制御・ロボティックスチ」の 6 つのテーマで研究を行っております。
電気自動車


非接触電力伝送システム

非接触電力伝送システムチームでは,電磁界共振結合に基づく非接触電力伝送に関する研究を行っている。電磁共鳴を用いた非接触電力伝送の原理が示されたことにより,大エアギャップかつ高効率な非接触電力伝送が達成された。これにより,いつでもどこでも電源ケーブル無しで電力が得られる,ユビキタスエネルギー社会実現への扉が開けたと言える。私たちのチームでは,電磁共鳴の基本的な原理を理解し,高効率・大エアギャップ・位置ずれに強い,という三拍子揃ったワイヤレス給電システム実現に向け研究を行っている。 |
人間親和型モーションコントロール
一昔前までは,ロボットを始めとする自動機械は工場などの限定された範囲でのみ使用されていました。 しかし,近年,我々の周りには自動ドアやエスカレータ,エレベータなど,さまざまな自動機械が登場し, 今後は福祉へのロボット技術の応用などによって,人間と機械が接触する機会はますます増えていくと考えられます。 そこで,こういった機器はこれまでの隔離された条件下で高性能な動作を行うのではなく,人間との接触を考慮した新しい特徴を備えることが必要になります。我々はこれを"人間親和型モーションコントロール"と定義し,人間に優しい機械を実現するために研究を行っています。
-生体機構"二関節筋"のロボティクスへの応用

二関節筋とは,生物が太古に獲得し現在に至るまで手放すことの無かった多関節筋の一種であり,近年,生物の運動制御に大きく貢献しているとして注目を集めています。 一方,現在のロボットは関節ごとにアクチュエータを備えた,"古い"タイプがほとんどです。 これらはロボットが単なる工作機械であった頃のロボティクスの延長上にあり,そこでは生物の複雑な筋構造は冗長で,無駄なものであるとして排斥されてきました。 しかし,技術が発達した今日に至っても,未だに生物の巧みな運動制御を実現できていません。 当研究室では生物特有の機構であるこの二関節筋をロボティクスへ応用し,関節モータにフォーカスを置いた既存の座標系とは違う,二関節筋を積極的に取り入れた座標系で新しいロボット工学を作っています。 これにより,より生物に近いロボットの実現を目指し,また,ロボット工学を介して生体機構そのもののの神秘を探っています。 |
-電動パワーアシスト車いすの運動制御

完全電動の車いすがあるのはご存知でしょうが,"パワーアシスト車いす"というものはご存じない方も多いのではないでしょうか。 この車いすは,人間が車輪に加えたトルクをセンサで計測し,その大きさに応じてモータによってアシストしてくれます。 我々はこのパワーアシスト車いすに,ジャイロセンサ,加速度センサ,などといった種々のセンサを取り付け, さらに制御装置を搭載することによって,傾斜がある道で直進したり,片手で楽に直進するといった利用者に優しい運動制御を研究しています。 |
-圧力センサによる車いす利用者の姿勢推定

近年,我が国では少子高齢化が著しく,4人に1人が高齢者という時代が目前となっております。 そんななか,車いす利用の高齢者数は増加しており,生活の大半を車いす上で過ごす方も多く,車いす上での姿勢が悪いため誤嚥(ごえん)性肺炎や褥瘡(じょくそう)から来る感染症によって命を落としてしまう方も多くなっております。 そこで,我々は車いすの座面に圧力センサを敷き,そこで得られる情報から患者の重心を推定し,どのような姿勢をとっているのかを判断しようとしております。さらに,推定した重心位置を使ったアシスト制御についても検討しております。 |
-電車ドアのセンサレスインピーダンス制御

電車のドアにベビーカーの足が挟まったまま走行してしまう,ビルの自動ドアに挟まれる,といった事件が後を絶ちません。 こういった人間と極めて近いところで動作する機器に,大きな機械的インピーダンスを持たせることは危険です。 しかし,あまりに軽くしてしまって電車のドアが走行中に開いてしまってはさらに危険です。 そこで,電気的な制御によってこの機械的インピーダンスを変えてしまおうというのが,電車ドアにおけるインピーダンス制御です。 外乱オブザーバの原理から外力を推定し,モデルインピーダンスによって機械的特性を変化させることで,あたかも非常に重いドアのように見せかけたり,ちょっと触れただけで止まるような敏感なドアに見せかけることが可能となります。 |
-二関節筋を利用した一脚2リンク跳躍ロボット

人間の歩行や走行・跳躍といった動作をロボットが行うのは一般的に非常に難しいと考えられております。 しかし,人間のみならず動物は当たり前のように実現しており,動物の中には生まれて間もなく歩き出すものもいます。 我々はこういった動作を記述する簡単なモデル「Spring Loaded Inverted Pendulum モデル」の上で考え,そこに二関節筋の特徴を組み合わせることによって簡単な制御と機構で跳躍を実現しようと考えております。 |
ナノスケールサーボ
- ハードディスク装置(HDD)のナノスケールサーボ制御

HDDは全世界で年間に数億台生産され数兆円の市場規模を有しますが,HDDレコーダなど情報家電や携帯電話・自動車等への需要が急増し,成長し続けています。そのヘッドの位置決め精度はナノメートルの領域に達しつつあり年率2倍という驚異的な速度で記録密度が増え続けています。我々は国内外のメーカの協力を得て'99年から新しい制御技術を次々に提案。実際に研究室で設計したコントローラは製品に実装され,世界最高性能を誇っています。この厳しい競争の世界はまた,新技術にも非常に開放的であり,良いものでさえあれば卒論の成果も実用化される可能性あり。 |
- AFMによるナノスケールサーボとナノスケールロボティクス
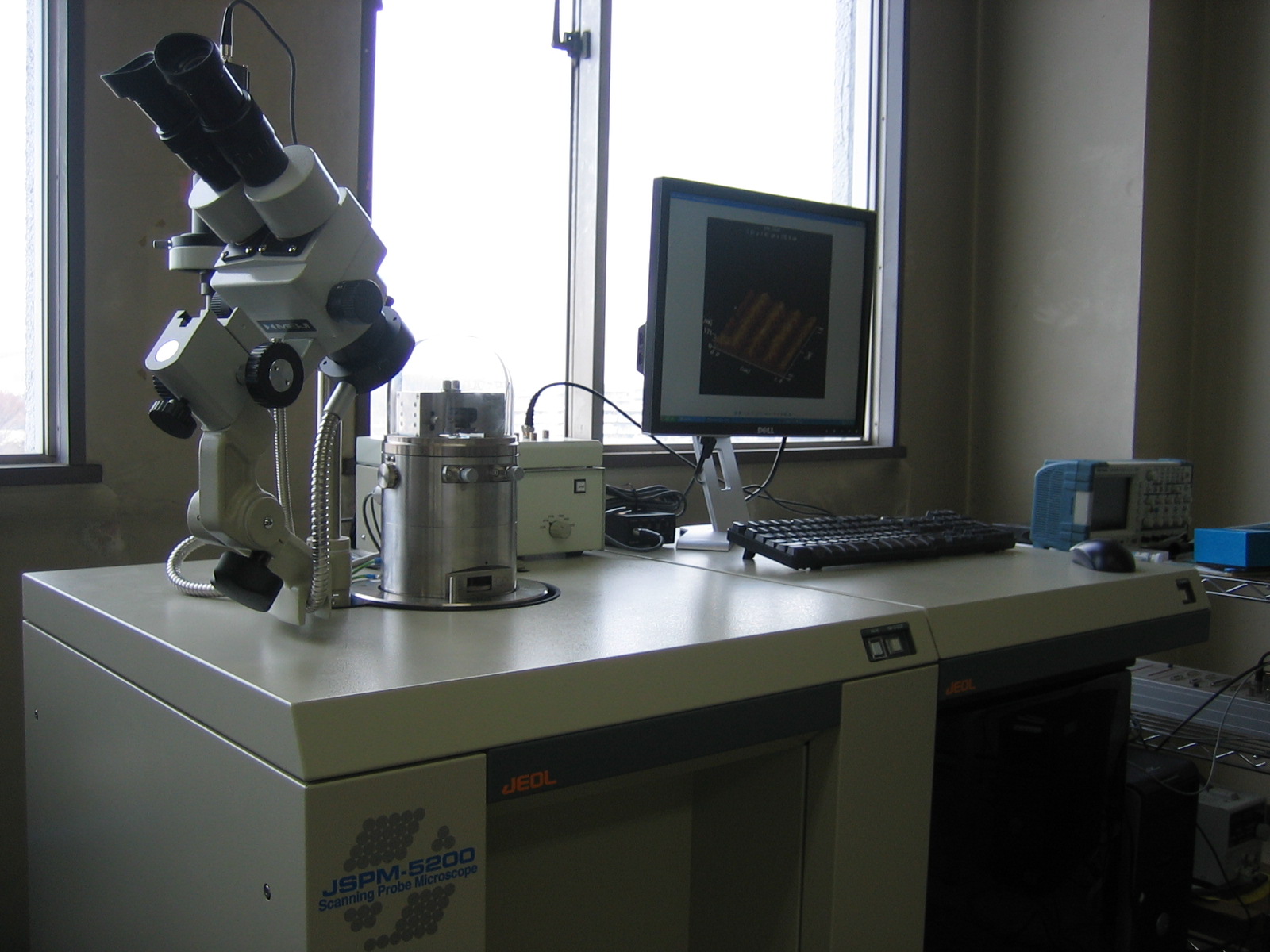 |
原子間力顕微鏡(AFM)とはナノスケールの針とフィードバック技術により物体表面を測定する装置ですが,この高速高精度化の研究を行い,ナノスケールでのマニピュレーション技術を確立します。これによりDNA操作はもちろん原子レベルの制御の夢も開けます。医療や材料分野へのモーションコントロールの貢献は,本研究室から始まります。
|
- ステージの位置決め制御

|
超高速ナノスケールサーボの研究を行うために、実験用の超精密ステージを試作しました。リニアモータ+エアガイド駆動のステージ。ナノスケールでの位置決めを実現するために分解能1 nmのリニアエンコーダを搭載。駆動側であるスライダ部と負荷側であるステージ部は板ばねで繋がれており共振特性を変えることができ,両部を固定することでステージ全体を1慣性システムとすることもできます。制御用のDSPのキャリア周期は0.1 msに対し,数〜十数キャリア周期以内のナノスケール超高速位置決めを目標とします |
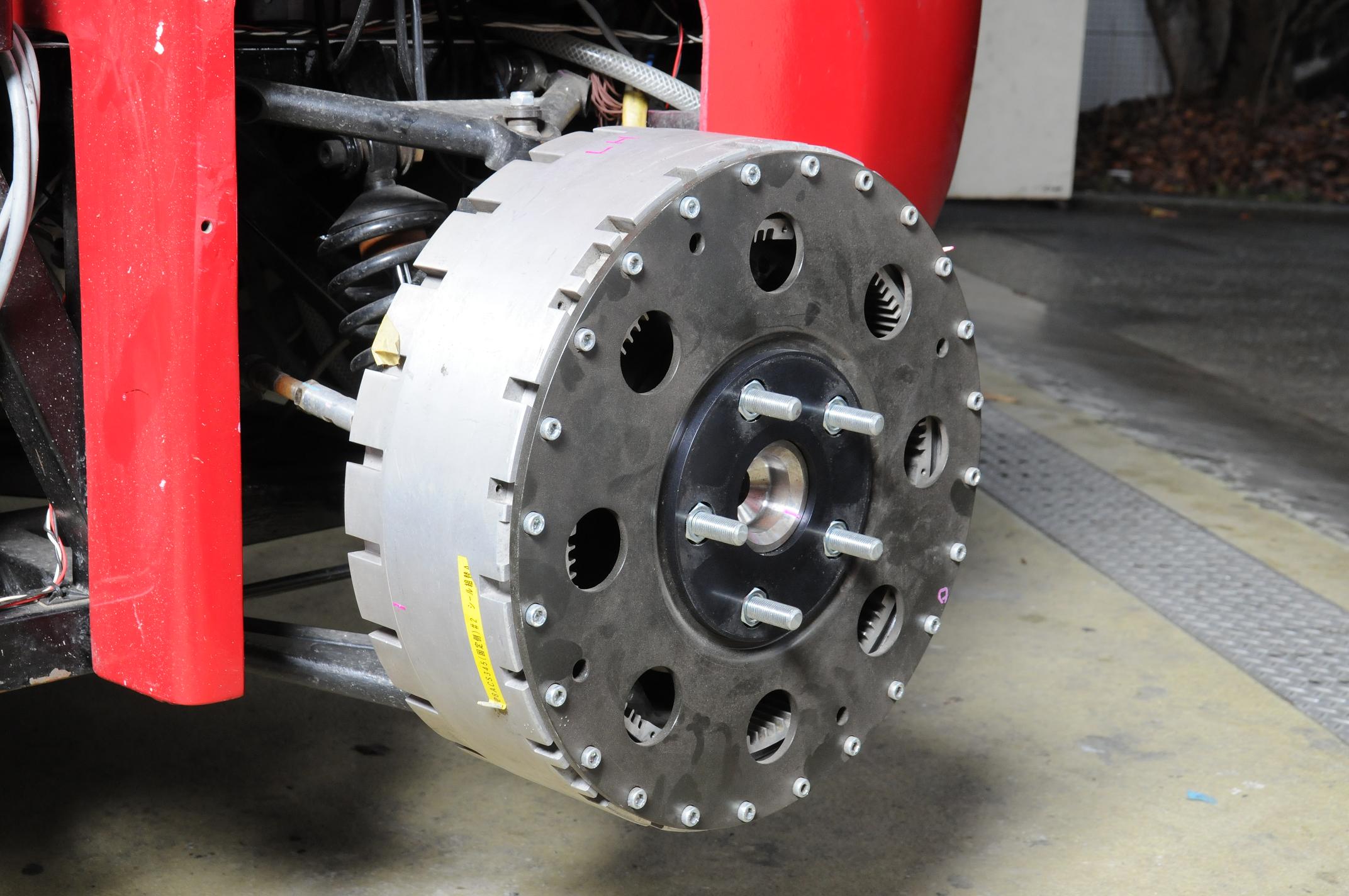
- NC工作機用ボールねじ駆動ステージの精密位置決め制御
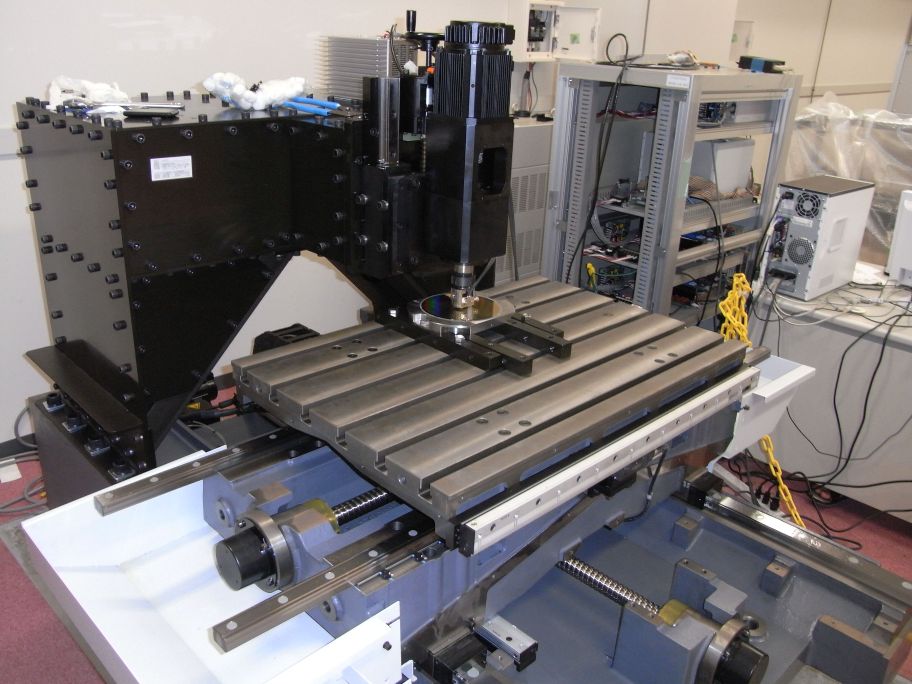 |
様々な装置を創りだすことからマザーマシンと呼ばれる工作機械。工作機械の加工精度を左右するボールねじ駆動ステージの精密位置決め制御を行っています。写真の実験装置は実際のNC工作機械のステージで,駆動モータの角度だけでなくステージ位置もリニアエンコーダから検出できます。また,制御工学の観点から切削加工の精度向上を図るために,主軸(Z軸)の制御ができるように改造しています。工作機械にアドバンスト制御を取り入れて大幅な性能向上を目指します。 |
- ガルバノスキャナの精密位置決め制御
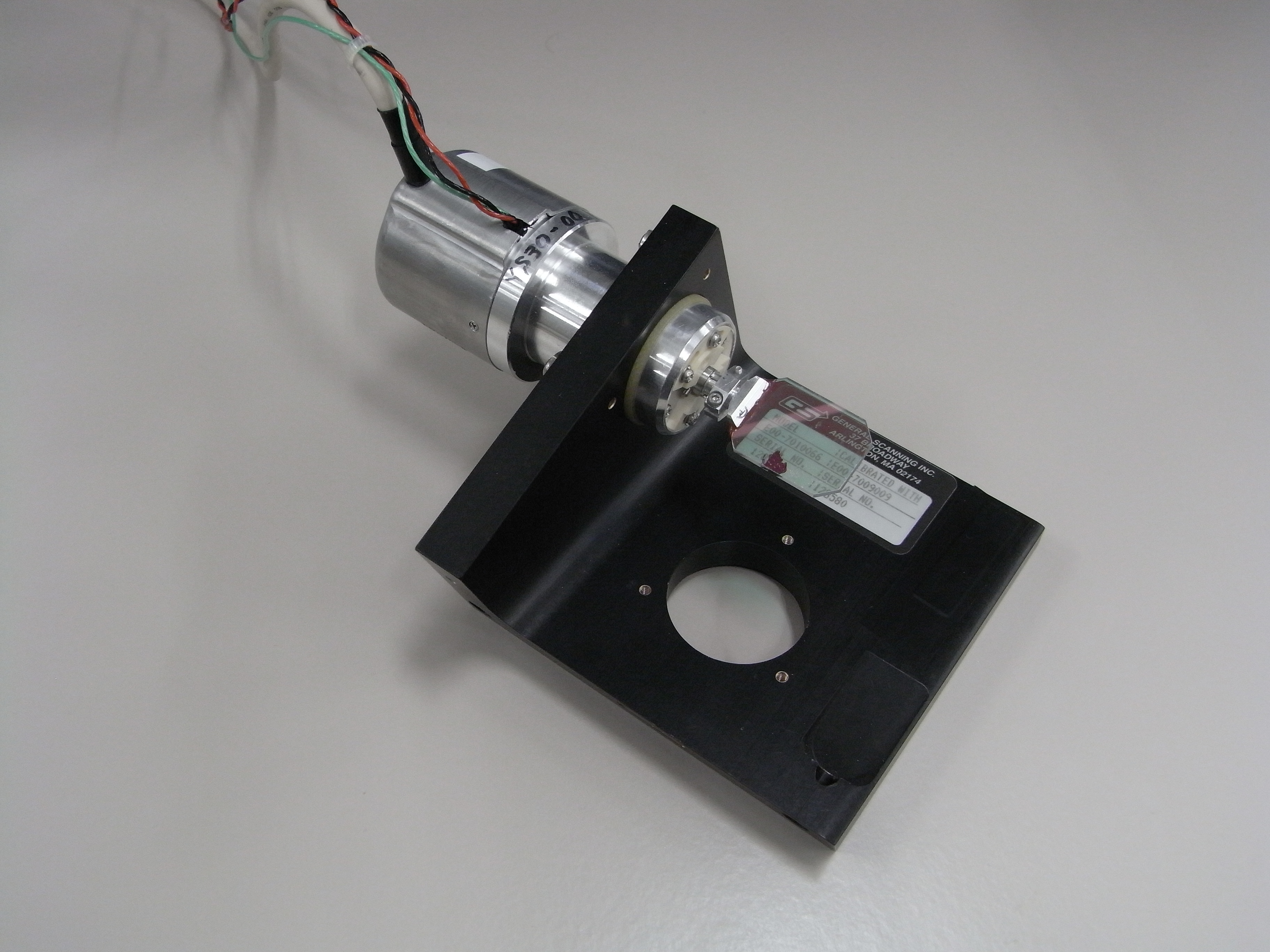 |
近年,各種情報機器をはじめとした,電子機器の小型・高性能化は目覚ましく,その背景には電子部品の高密度実装技術の急速な進展がある。 この高密度化を支える技術として,プリント基板へのレーザー加工技術の発展があるが,こうしたレーザー加工法の一つとして,ガルバノスキャナは用いられている。 ガルバノスキャナとは,写真にあるように,モータの先にミラーの付いたデバイスである。レーザの出力光をミラーで反射し, ミラーを高速高精度に回転させることで反射光を所望の場所に照射し,レーザ加工を行う。 当研究室ではフィードフォワード・フィードバック制御を改良することにより,より早く正確な応答を目指している。 |
パワーエレクトロニクス
- PMモータの高性能制御
 |
マルチレートPWMという研究室独自の方式によるPMモータの超高速高精度な位置決め制御, 高速電流応答制御,高調波電流抑制などの研究を行っています。 |
- マルチレートPWMに基づくインバータ制御
 |
電気自動車等の発達により、これからはよりインバータの制御が重要になってきます。 従来からインバータの高速、高性能制御系にディジタル制御が行われています。 しかし、従来法では任意の指令値に対して完全に追従することは不可能でした。 我々の研究室では、マルチレートPWMという方式を用いて、任意の電圧、電流を出力することを研究しています。 |
 |
近年、各種パワエレ機器が発生する高調波が問題になっています。 高調波は余分な損失を増やしたり、機器の損傷等を引き起こす可能性があります。 そのために、我々はアクティブフィルタを用いることで高調波を除去することを目指しています。 電圧型インバータを用いて電流を制御し、アクティブフィルタから高調波と逆位相の電流を流すことで 高調波をキャンセルできます。 |
航空・宇宙機制御・ロボティックス
航空・宇宙機制御・ロボティックスチームでは、電気飛行機や月面着陸機、ロボットなどの制御を行っています。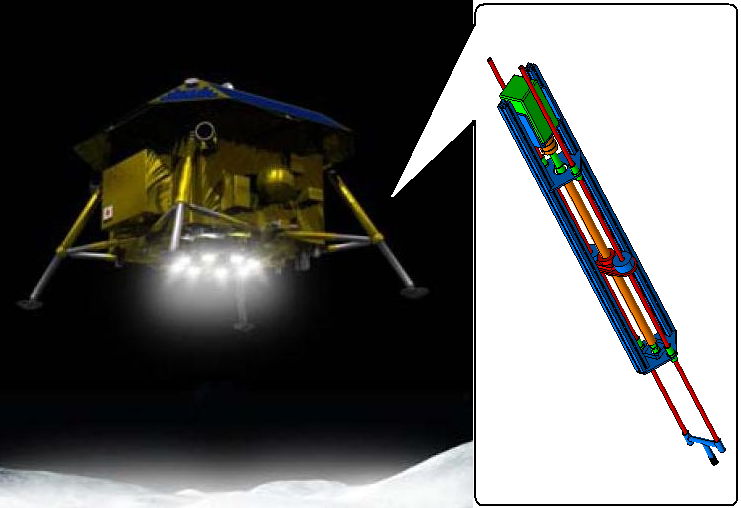
JAXA宇宙科学研究所(相模原)と共同で月惑星着陸機の着陸脚の研究を行っております。着陸時の衝撃力を吸収する方法として、従来からアルミハニカムなどのパッシブな機構が多く用いられてきました。しかし、パッシブな機構ではその性能に限界があるだけでなく、地上試験で問題のないものを月面上で再度使用することができません。 当研究室では、ボールねじアクチュエータを持つ着陸脚とセンサを使い、脚をアクティブに制御することで着陸の際の衝撃力緩和と転倒を防ぐ研究しています。
電機航空機はまだ実用的な段階とは言えません。しかし、将来電気を動力源とする航空機の活躍が期待されており、電気飛行機制御の基礎的な研究を始めようとしています。 また、ビジュアルセンサ(カメラ)を用いた、ロボットや電動ヘリコプタの制御の研究もテーマとして扱っております。
- 電気飛行機
 |
電車や自動車がたどってきたように, |