堀研究室公開の内容
日時:2000年7月5日(水)14:00〜18:00
場所:工学部3号館4階404号室,地階2号室,裏玄関前
現在の堀研究室の研究テーマは,大きく「モーションコントロール」,「電気自動車」,「その他」のグループに分類されます。
(1)モーションコントロール(Motion Control)
外乱オブザーバに基づいたロバストサーボ系の設計
実用的なサーボ制御には,制御対象の変動などに対するロバスト化が要求される。フィードバックのみによる制御系では,目標値応答と外乱応答にトレードオフの関係があり両者を独立に設計できない。一方,外乱オブザーバにより得られる外乱推定値を用いて外乱抑圧制御を行うことにより,外乱が抑圧され,制御対象がノミナル化される。これは,外乱抑圧特性を大きく向上させる優れた方法である。さらに,外乱オブザーバの構造を含んだ2自由度制御系の設計法を明らかにした。この方法は,外乱抑圧特性と目標値応答特性を独立に設計できるという優れた特徴を持つ。
堀がむかし手作りした愛用のMGセット
瞬時速度オブザーバ
産業界で一般的な,エンコーダで速度を検出するモータ制御では,低速度域でのエンコーダパルス数減少が問題となる。瞬時速度オブザーバは,エンコーダパルスが得られない時点の瞬時速度をモータ電流から推定する手法である。10倍程度の低速度運転が可能となり,電気自動車や鉄道の車速推定などに威力を発揮する。また,慣性モーメントの同定も良好に行うことができる。
DSP制御の瞬時速度オブザーバ実験装置(これも手作り)
ギア付き2慣性系システム
2慣性系で代表される柔軟システムの制御は,モーションコントロール分野だけでなく,工学分野全体において重要な技術である。当研究室では,このような柔軟システムに対して,外乱オブザーバを利用して2慣性系の慣性比を制御する共振比制御,その共振比制御に使う外乱オブザーバの時定数の最適化,バックラッシュによるトルクを補償するギアトルク補償制御などを提唱してきた。バックラッシュや摩擦など,非線形要素の調整ができる2慣性系システムを利用してこれらの制御性能を確認する。
MHI製のバックラッシュ,摩擦つき2慣性共振系実験装置
3慣性系のH∞最適制御における振動抑制
H∞制御器の設計において,制御系の仕様に応じた目的関数や重み関数の決め方,およびそれらのチューニング法に重点をおいた一般的な設計法を提案しているが,これを,3慣性軸ねじれ振動実験装置(DSP制御,慣性比を広い範囲で変えることができる)を用いて,PI・PID・H∞最適制御の振動抑制性能の比較をおこなう。とくに慣性比が小さい場合は制御が難しいといわれているが,提案法によれば,良好な性能を実現することが可能である。
ECP製3慣性系実験装置
動力学を考慮に入れたロボットマニピュレータの制御性能向上
ロボットマニピュレータを高速かつ精度よく制御するために,マニピュレータの動力学を含めた制御手法を考える。今日のマニピュレータ制御では各関節を独立に制御する外乱オブザーバなどの線形制御手法が多大な成果を得ているが,更なる制御性能の向上のため,ロボットマニピュレータの非線形性に注目し,その性質を補償・制御する。
DDモータを用いた平行2リンクロボット(IMI製)
コントローラ(最近OSをLynuxに更新)
操作量飽和を考慮したアンチワインドアップ制御系の構成
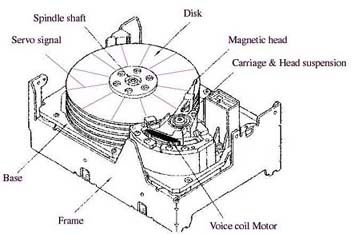
サーボ制御において,アクチュエータに電流/電圧リミッタなどの操作量飽和が生ずると,ワインドアップ現象が生じる。これは目標値/外乱応答特性を大きく劣化させる。フィードバック制御器の左既約分解に基づくアンチワインドアップ制御系として,オブザーバの推定値に着目した構成法を提案した。また,2自由度制御系に対して,フィードバック/フィードフォワード制御器それぞれにリミッタを挿入することにより,制御系の構造に着目した構成法を提案した。本手法により操作量を最大限に利用した高速な出力応答を得ることが可能となる。本手法は,サーボモータの速度/位置制御をはじめとして,関節トルク飽和を考慮したマニピュレータ制御,磁気ディスク装置のヘッド位置決め制御など,幅広い応用が考えられる。
どこにでもあるハードディスクドライブ
マルチレートサンプリング制御を用いた新しいモーションコントロール法に関する研究
ロボット・モータ・磁気ディスク装置等のメカトロ機器の高速・高精度制御系においては,コンピュータを用いて制御を行うディジタル制御が重要な役割を果たしている。これらの制御のサンプリング周期と制御周期は,計算機やセンサ・アクチュエータ,AD/DA変換器の性能によって決定されるが,従来型の制御方式では,サンプリング周期と制御周期を同期させるシングルレート方式が使用されてきた。これに対して,本研究では入出力の周期を敢えて多重化するマルチレートサンプリング制御の提案を行い,これをモーションコントロールへ適用している。その具体的な成果は以下のようなものである。
1 閉ループ特性を保存する厳密な制御器の離散化
2 誤差なく目標軌道に追従する完全追従制御法
3 サンプル点間に複数回,外乱の影響を零にする完全外乱抑圧制御法
4 完全追従制御のハードディスク装置への応用(日立との共同研究。実用化。)
5 ナイキスト周波数周辺の振動抑制制御
6 高次外乱の繰り返し外乱抑圧制御
7 繰り返し外乱抑圧制御のロボットのビジュアルサーボへの適用
(見学会においては,上記の完全追従制御法を2軸DDロボットに適用した実験のデモを行なう予定。)
再構成アトラクタを用いた二重振り子の安定化制御
再構成アトラクタという状態空間を用い,カオス制御の代表的な手法であるOGY法を拡張して実際の二重振り子の安定化制御に適用し,振幅を一定化できることを示す。さらにこの安定化制御が基本的に外乱抑圧制御であることを示し,代表的な外乱抑圧制御法である外乱オブザーバ法との比較を行い,提案制御法がはるかに小さな入力で安定化を成し遂げていることを示す。
カオスの実験装置
(2)電気自動車(Electric Vehicle)
電気自動車の運動制御
電気自動車(EV)には通常の自動車に比べてトルク応答が非常に高速であるという優れた特徴があり,堀研究室ではこの特徴を活かした運動制御の研究を行なっている。本研究室では,過去に実験用EVである「東大三月号」を製作しており,これを用いて様々な駆動力制御や路面状態推定の実験を行なっている。また,現在新たに複数の電気モータを分散配置するEVを製作中であり,これを用いて姿勢制御などの実験を行なう予定である。この他に,EVのための誘導機のセンサレス制御の研究や,電池の残存容量推定の研究も行なっている。
(この項目はいっぱいあるので,ここではさらりと書いてあります。)
東大三月号(I)よく走ります。
東大三月号(II)完成まじか!
Sensorless Efficiency-optimization Control of Induction Motor Applied to Electric Vehicles(誘導機の効率最大化制御)
As well known, induction motors (IM) are the most employed in industry because of their advantages over other kinds of motors: simple construction, good reliability, low price,... But their low efficiency in the light-load conditions restricts theirs applications in some fields such as electrical vehicle (EV) technology where a high-efficiency motor is normally required to extend the running distance per battery charge.
In our laboratory, an efficiency-optimization control technique for IM is recently proposed by means of minimizing the input power for a given operation point. The algorithm uses the "golden section technique" in the process searching the optimal value of rotor-flux-producing stator-current component, for which the electrical input power of the system is minimal. In addition to the rapidity, the proposed search controller has a great advantage of insensibility to motor parameter variations. Simulation results and experimentation on a laboratory 2.2 kW IM drive confirm the validity of the proposed method, which can be seen as a promising control technique that makes IM suitable for EV applications.
誘導機実験装置(NF+MyWay製)
(3)その他(Others)
自律分散制御された多数のアクチュエータで構成される物体搬送システム"Magic Carpet"の設計と試作
自律分散型の制御アルゴリズムによって駆動される,物体搬送システムMagic Carpetを提案する。提案するシステムはたくさんのアクチュエータやセンサなどで構成される特殊なシステム構成となっている。マイクロマシーンニング技術の発達によって,センサや電子回路を含む超小型モジュールをきわめて多数集積し,個々のモジュールが協力して仕事(たとえば物体搬送)をするという状況が生じる。そこで問題となるのがケーブルなど通信路の確保であり,せいぜい隣接モジュールとの交換情報をもとに動作させるアルゴリズムが必要となる。提案するシステムはこのようなシステムのアルゴリズム開発を目指している。
つんつんアクチュエータ(まったくの手作り)
TCSCを利用したタービン・発電機間の軸ねじれ振動抑制
タービン・発電機間の軸ねじれ振動抑制に,FACTS機器の一つであるTCSC(サイリスタ制御直列コンデンサ)を利用することを提案し,その設計法を考慮した研究である。TCSCはもともと送電線容量を増すための静的な機器であるが,サイリスタの点弧制御によってその容量をきわめて高速に変化させることができるため,系統に起きる振動としては比較的高周波振動に属する軸ねじれ振動の抑制に効果的である。しかし,TCSCは応答速度では優れた特性を持つ半面,強い非線形性を示す入力であるので,それを考慮した設計が必要である。そこで,二つの設計手法(線形近似および状態変数を用いた正確な逆算)を利用した制御入力の変換法を提案し,MATLABを用いたシミュレーションによってその性能を確認した。
高齢者工学に関する研究 〜高齢者モニタリングシステム〜
深刻な高齢化社会を迎えた今,高齢者を工学的な立場から支援する”高齢者工学”という分野の研究が重要である。その工学的支援の一つとして,特に一人暮らしの高齢者の部屋をモニタリングし,普段と異なる異常な様子を自動的に検出するシステムの実現を目指す。本研究では,自己組織化マップや固有空間法などを用いている。
高齢者チーム