Overview
In Hori-Fujimoto Laboratory, we are researching in 6 main themes: "Electric Vehicle", "Wireless Power Transfer System", "Wireless In-Wheel Motor", "Nano-Scale Servo", "Electric Aircraft and Space Craft", and "Human Friendly Motion Control"
Electric Vehicles (EVs)


Recently, due to environmental and energy concerns, electric vehicles, including hybrid cars and fuel-cell powered vehicles, have been receiving more attention. Our main focus is, however, on control system technology. Electric motor has much faster torque response than combustion engines, which allows feedback control to be applied. For example, on low friction road such as the road covered with snow, control system can be applied to the car in order to allow stable steering. Moreover, due to proportional relation between torque and motor current, road conditioni can be easily obtained by observing motor current.
The cars for experiments are C-COMS I & II which have been modified to run on capacitor only, and COMS III (left), FPEV2-Kanon which is the original EV developed in our laboratory. These EVs are all equipped with in-wheel motors, which allows each wheel to be driven independently, where we aim to improve the stability of driving control. In addition, in 2012, our laboratory has finished building a new garage (250m2) and a new test course (88m×30m), located in Kashiwa campus!! There are also experiments run in test course provided by manufacture company in collaboration.
|
Wireless Power Transfer

In this Wireless Power Transfer (WPT) team, we research a wireless power transfer technology that is based on Electromagnetic Resonance Coupling. Ever since the theories of wireless power transfer via electromagnetic resonance are proven, a wireless power transfer technique that has a large air gap and a high efficiency is achieved. With this technology, electricity can be obtained without a power cord anytime, anywhere. It can be said that the door to the realization of a ubiquitous society is opened. Our team studies the basic theories of electromagnetic resonance, and conducts researches to create a wireless power transfer system that has the three advantages of having a large air gap, high efficiency, and resistant to positional shifts. |
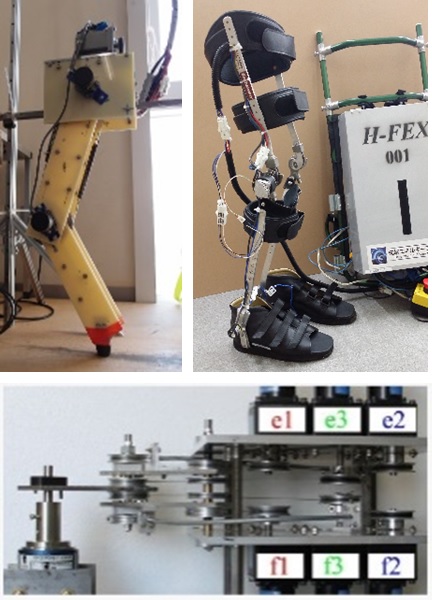
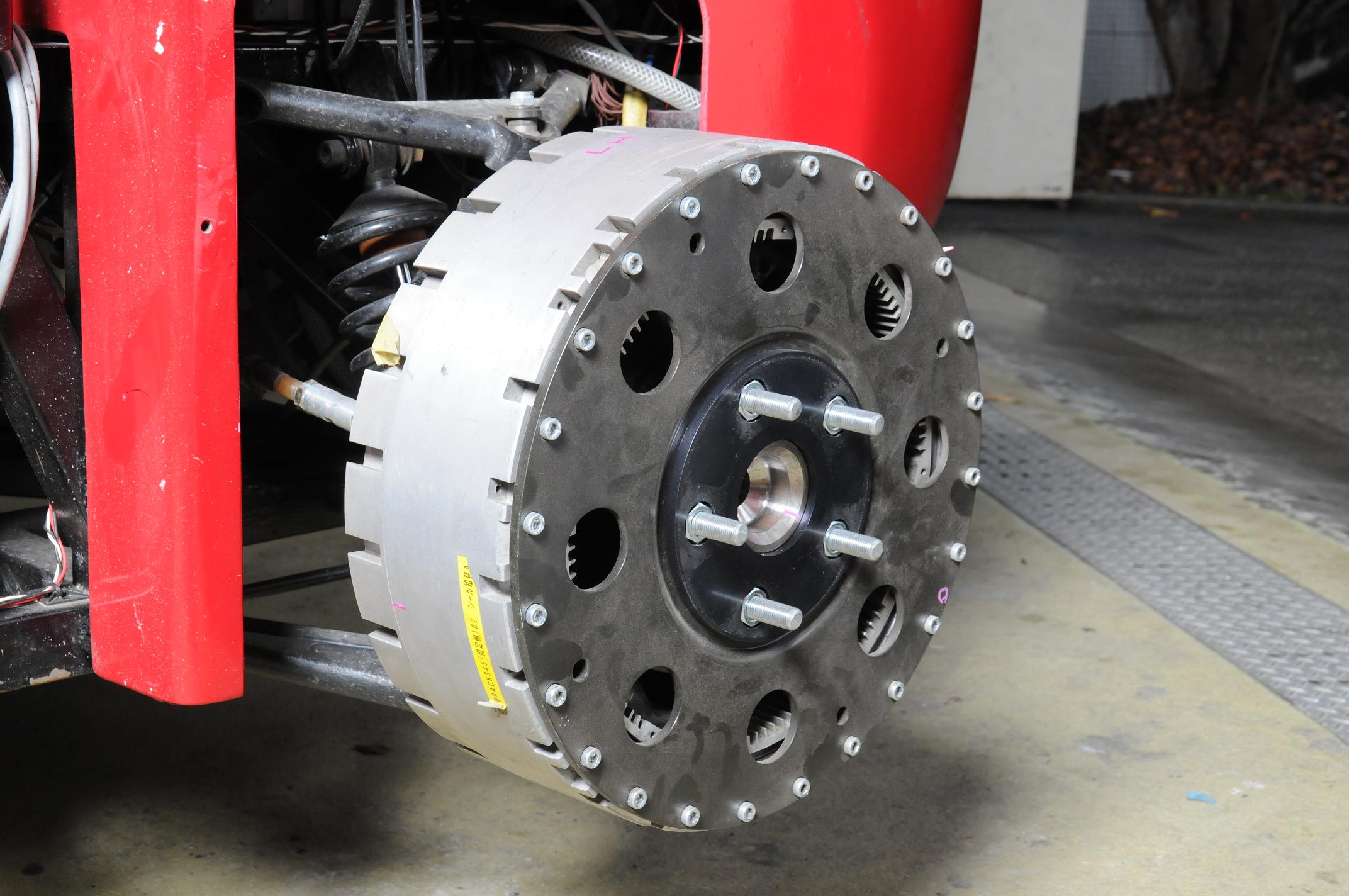
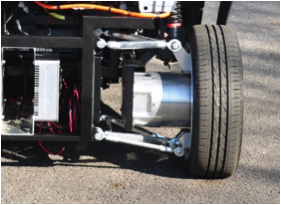
Wireless In-Wheel Motor

Nano-Scale Servo
- Nanoscale Servo Control of Atomic Force Microscopes
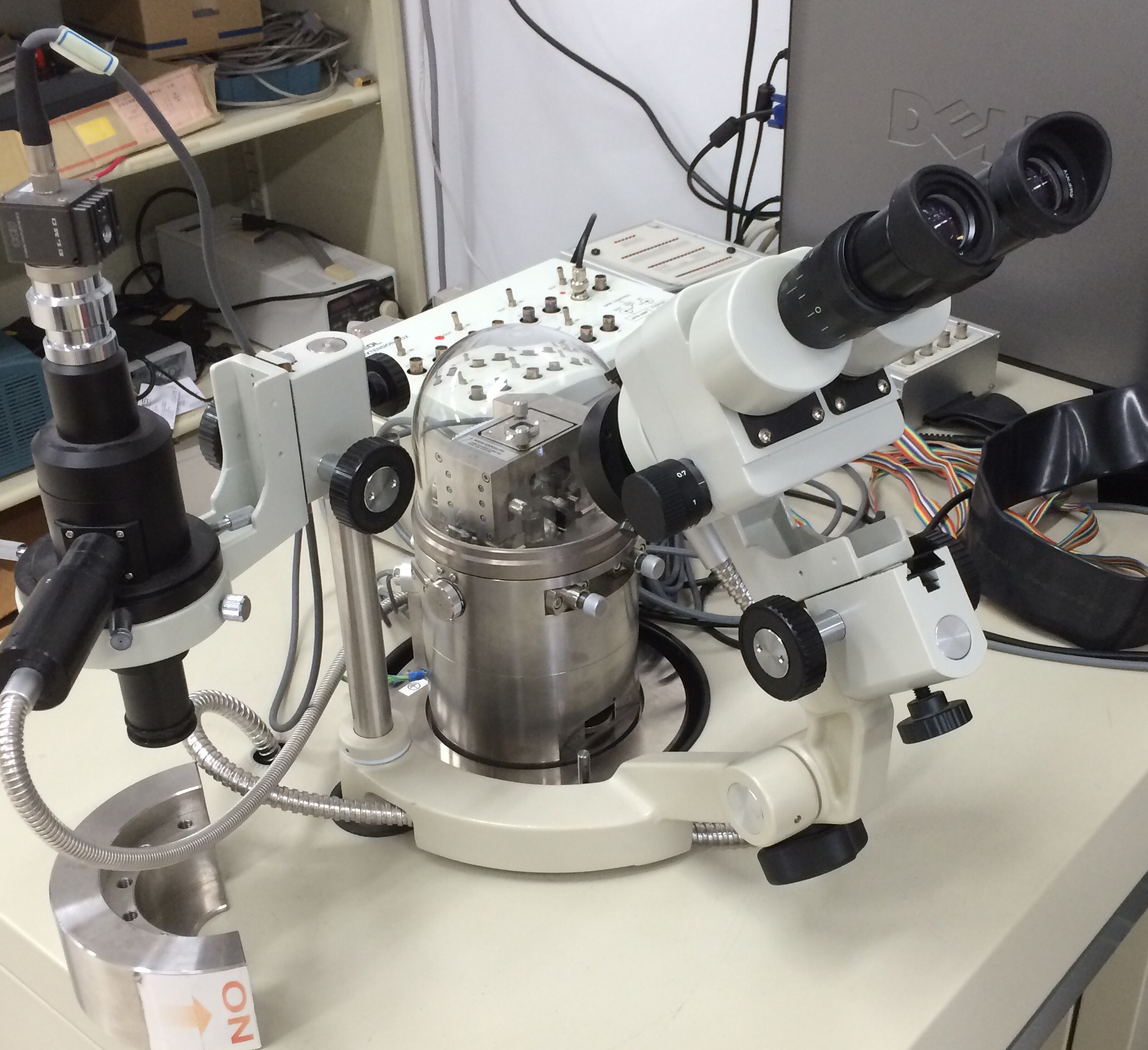 |
Atomic force microscope (AFM) is equipment which measures the object surface by nanoscale needle and feedback technology. It inquires about the high-speed flower of AFM, and highly precise-ization, and the manipulation technology in nanoscale is established. Thereby, of course, the control of an atom level of DNA operation is also achieved. The contribution of the motion control to medical treatment or the material field begins from this laboratory. |
- Positioning Control of Stage
|
In order to study an ultra high-speed nanoscale servo, the super-precision stage for an experiment was fabricated. The stage of the linear motor + air guide drive. The experimental model is on the stage which combined the linear motor and the air guide. Resolution is provided with the linear encoder of 1 nm in order to realize positioning in nanoscale. It is connected by the flat spring between the slider which is the source of the thrust, and the stage which is load, and the resonance characteristic is variable. Moreover, if the slider and the stage are fixed, the whole stage will become 1 inertia system. It aims at nanoscale ultra high-speed positioning within carrier periods more than ten to the carrier periods of DSP for control. |
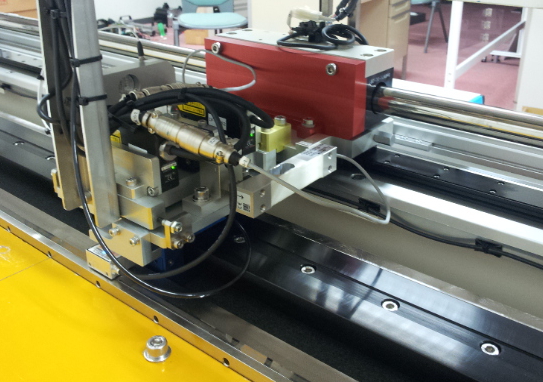
- Precision Positioning Control of Ball-screw Drive Stage for NC Machines
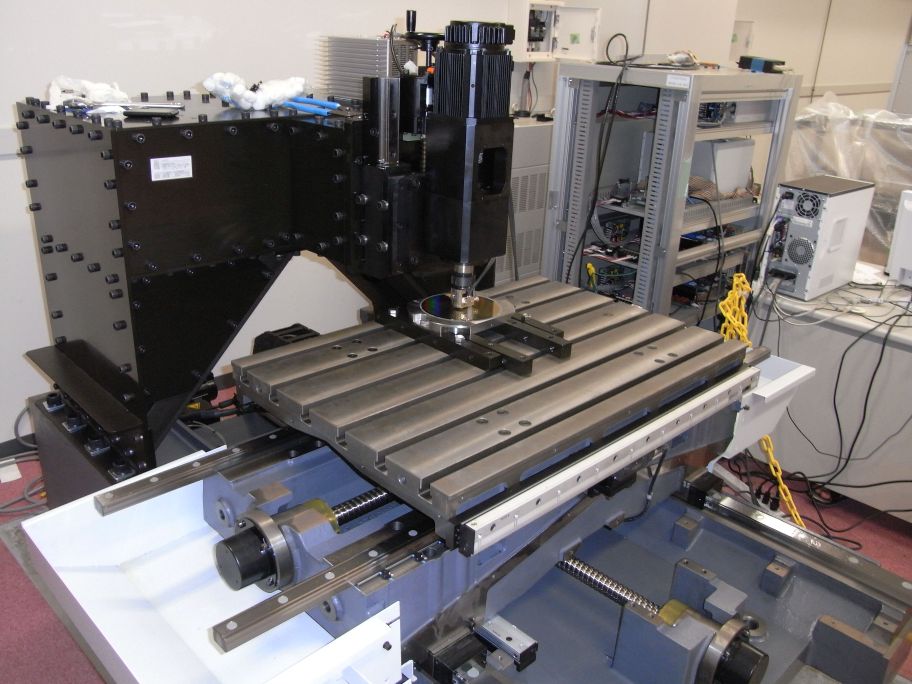
|
The machine tool called the mother machine since various pieces of equipment is produced. Precision positioning control of the ball screw drive stage which is the key of the processing accuracy of the machine tool is carried out. The experimental device of the photograph is the stage of an actual NC machine tool. In this experimental device, not only the angle of the drive motor but the stage position is detectable with the linear encoder. Moreover, from the viewpoint of control engineering, in order to make cutting accuracy improve, it is reconstructed so that the spindle axis can be controlled. It is the goal of research to apply advanced control to the machine tool and to achieve large improved efficiency. |
Electric Aircraft(EA) and Space Craft control


For Electric Aircraft(EA), we have been developing high speed and high precision controls utilizing the advantages of the electric motors. In 2015, a plane air speed control by towing test, a yaw rate control using ladder steering, a landing route optimization for regenerative control, and a vertical speed control using propeller slipstream have been proposed. We will develop manned EA and new control methods to improve safety and motion performance. Also, lunar probe full active landing gear, its fall prevention control method, and a control method to improve off-road performance of rover using slip ratio control will be proposed. |