研究概要
堀・藤本研究室では大きく分けて「電気自動車」,「非接触電力伝送システム」,「人間親和型モーションコントロール」,「ナノスケールサーボ」,「パワーエレクトロニクス」,「航空・宇宙機制御・ロボティクス」の 6 つのテーマで研究を行っております。
電気自動車



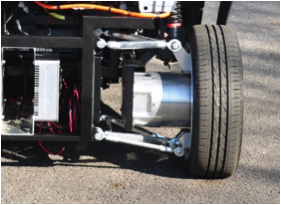
近年,環境・エネルギー問題の対策としてハイブリッド車や燃料電池車を含む広い意味での電気自動車が注目されていますが,我々の視点はその先の「制御技術」にあります。 堀・藤本研究室では,高い制御性能を持ったインホイールモータに注目しています。 インホイールモータを搭載したEVは各車輪を個別に,高速に,正確に制御することができるので,従来不可能だった様々な制御が可能になります。 4輪にインホイールモータや横力センサなどを搭載した「FPEV2-Kanon」(写真左),GPSやカメラを搭載した小型EV「C-COMS1」(写真中央),駆動方式を簡単に変更できる「FPEV4-Sawyer」(写真右)を中心に研究を行っています。 柏キャンパス内の走行実験場(88m ×30m)での実験だけでなく,自動車メーカとの共同研究によるテストコースでの制御実験もあります。
-先進安全制御
|
モータの制御応答はエンジンよりも100倍程度速いので,高速なフィードバックをかけることができ,滑りやす・「路面で車輪の空転やロックを防ぐEVを作ることができます。 また,自動操舵や各車輪の出す力を制御することで安全に障害物を回避する研究も行っています。 このように,EVの高い制御性能を生かせば,今までより安全な車を作ることができます。 |
-航続距離延長制御
|
一般的なガソリン車が1回の給油で約400km走るのに比べて,電気自動車は1回の充電で走れる距離は約100kmです。 堀・藤本研究室では,制御だけを使って,この短い航続距離を延ばす研究を行っています。 複数のモータを搭載したEVでは,速度や路面の条件で最も効率が高くなるように前輪と後輪で出す力の大きさを制御することで航続距離を延ばすことができます。 現在は,効率の良い加減速パターンで走行することで,さらに航続距離を延ばす研究も行っています。 |
新ガレージと走行実験場についてはコチラ
電気自動車の実験動画はコチラ
非接触電力伝送システム
-電磁界共振結合方式の特性解析

|
非接触電力伝送システムチームでは,電磁界共振結合に基づく非接触電力伝送に関する研究を行っています。電磁共鳴を用いた非接触電力伝送の原理が示されたことにより,大エアギャップかつ高効率な非接触電力伝送が達成されました。これにより,いつでもどこでも電源ケーブル無しで電力が得られる,ユビキタスエネルギー社会実現への扉が開けたと言えます。私たちのチームでは,電磁共鳴の基本的な原理を理解し,高効率・大エアギャップ・位置ずれに強い,という三拍子揃ったワイヤレス給電システム実現に向け研究を行っています。 |

|
非接触電力伝送技術を用いた電気自動車への・挙dに関する研究を行っています。非接触電力伝送により走行中や短時間の停車中に地面から電気エネルギーを供給することによって,現在電気自動車の普及の妨げとなっているバッテリの大きさを劇的に小さくことができます。電気自動車への応用では主にkHz帯を用いた給電が主力であると考えており,コイル設計やインピーダンス制御による効率改善,走行中給電における送受電システムの最適化等の研究をパワーエレクトロニクス等の技術と組み合わせて行っています。 |

人間親和型モーションコントロール
一昔前までは,ロボットを始めとする自動機械は工場などの限定された範囲でのみ使用されていました。 しかし,近年,我々の周りには自動ドアやエスカレータ,エレベータなど,さまざまな自動機械が登場し, 今後は福祉へのロボット技術の応用などによって,人間と機械が接触する機会はますます増えていくと考えられます。 そこで,こういった機器はこれまでの隔離された条件下で高性能な動作を行う・フではなく,人間との接触を考慮した新しい特徴を備えることが必要になります。我々はこれを"人間親和型モーションコントロール"と定義し,人間に優しい機械を実現するために研究を行っています。
-電動パワーアシスト車いすの運動制御

|
完全電動の車いすがあるのはご存知でしょうが,"パワーアシスト車いす"というものはご存じない方も多いのではないでしょうか。 この車いすは,人間が車輪に加えたトルクをセンサで計測し,その大きさに応じてモータによってアシストしてくれます。 我々はこのパワーアシスト車いすに,ジャイロセンサ,加速度センサ,などといった種々のセンサを取り付け, さらに制御装置を搭載することによって,傾斜がある道で直進したり,片手で楽に直進するといった利用者に優しい運動制御を研究しています。 |
-生体機構のロボティクスへの応用
|
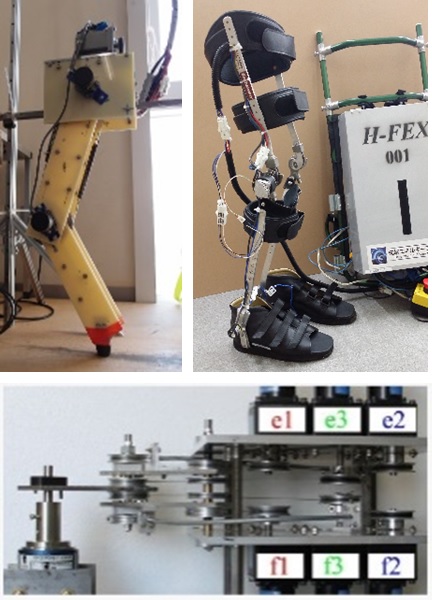
生体機構では「ニ関節筋」というものがあります。二関節筋とは,生物が太古に獲得し現在に至るまで手放すことの無かった多関節筋の一種であり,近年,生物の運動制御に大きく貢献しているとして注目を集めています。 |
ナノスケールサーボ
- AFMによるナノスケールサーボとナノスケールロボティクス
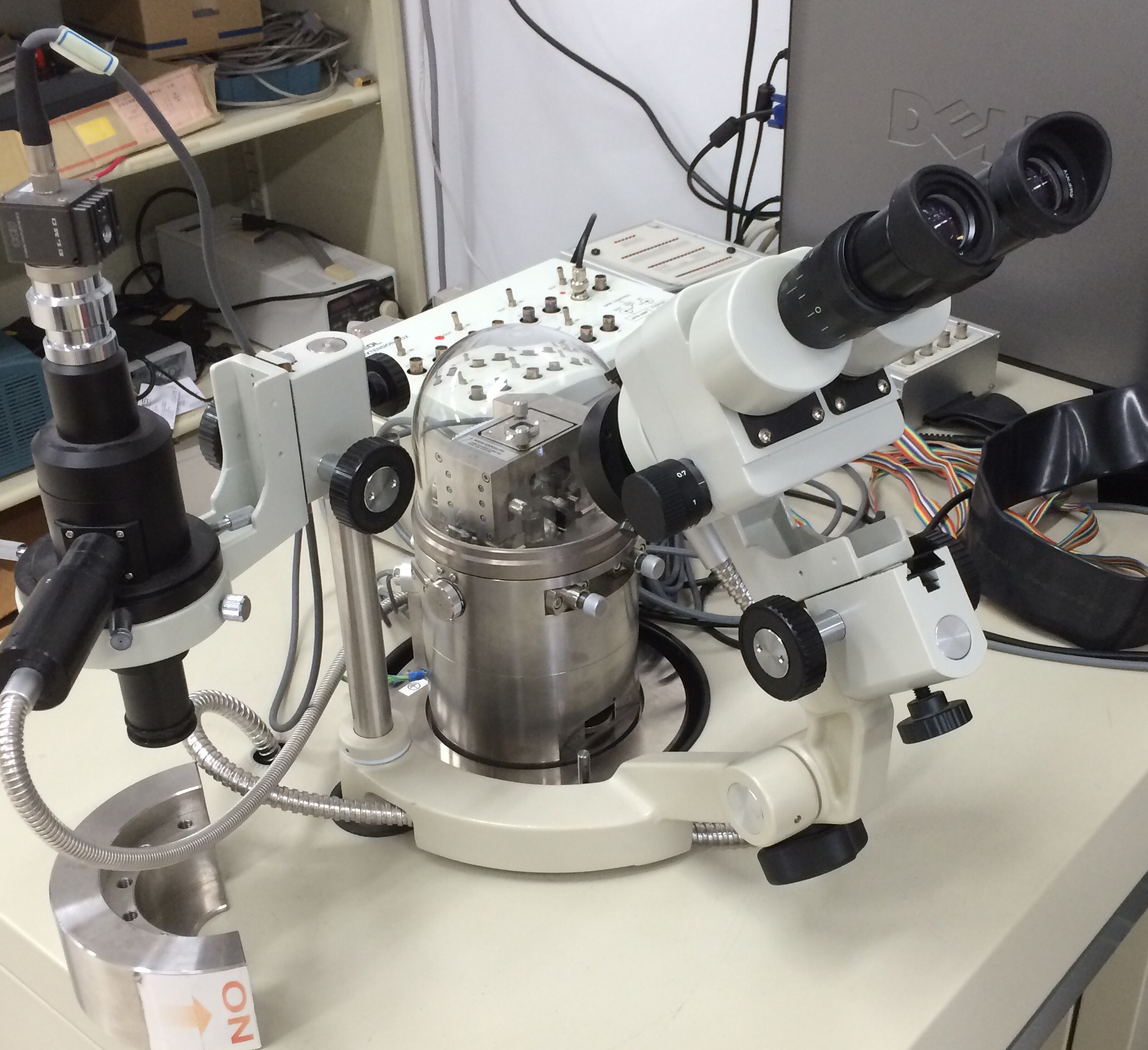 |
原子間力顕微鏡(AFM)とはナノスケールの針とフィードバック制御により物体の表面形状を測定する装置です。本研究室では測定時間の短縮や高精度化をはじめとして,弾性推定やフォースカーブ測定といった試料の力学特性の測定,さらには探針を用いたナノマニピュレーションに関する研究も行っております。近年半導体をはじめとした各種分野でデバイスの微細化が急速に進んでおり,AFMの制御はこれからのテクノロジーの進歩に欠かすことのできない技術です。
|
- ステージの位置決め制御
|
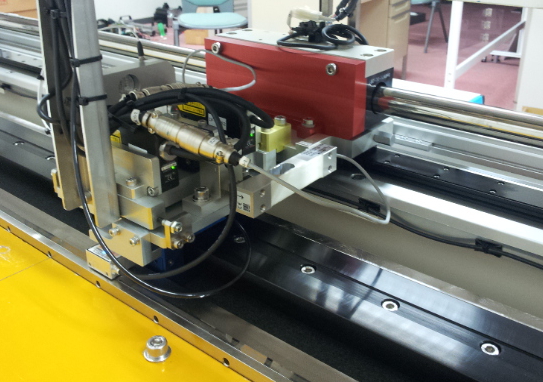
超高速ナノスケールサーボの研究を行うために、実験用の超精密ステージを試作しました。駆動部であるリニアモータ及びエアガイドの負荷ステージから成る装置です。ナノスケールでの位置決めを実現するために分解能1 nmのリニアエンコーダを搭載。駆動側であるリニアモータ部と負荷側であるステージ部は板ばねで繋がれており2慣性系システムに,また両部を固定することで装置全体を1慣性系システムとすることもできます。制御用のDSPのキャリア周期に対し,十数キャリア周期以内のナノスケール超高速位置決めを目標とします。 |
- NC工作機用ボールねじ駆動ステージの精密位置決め制御,加工時における振動の抑制
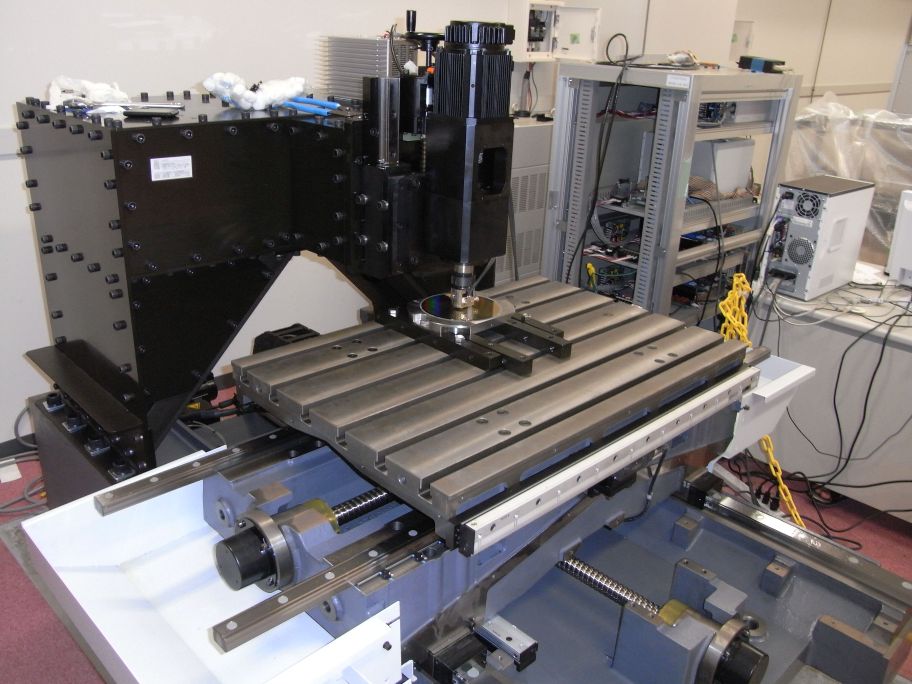 |
様々な機械部品・装置を創り出すことからマザーマシンと呼ばれる工作機械。工作機械の加工精度を左右するボールねじ駆動ステージの精密位置決め制御及び加工時における振動の抑制を行っています。写真の実験装置はNC工作機械のステージで,駆動モータの角度だけでなく,ステージ位置も分解能1 nmのリニアエンコーダから検出でき,精密な制御法の研究に適した装置となっています。ステージの精密位置決め制御の研究としては,精密な位置決めの妨げとなるボールねじ部の非線形摩擦の補償法を研究し,位置決め性能の向上に努めております。また,工具が取り付けられる主軸モータの制御を高速高精度に行うことで,切削加工時に加工精度を劣化させる要因となるびびり振動の抑制に成功をしております。 |
- 負荷側エンコーダを用いた2慣性系の制御
 |
2慣性系とは,モータと負荷が剛性の低い要素で接続された一般的な対象の特性を表現できるモデルです。写真のロボットアームだけでなく,ボールねじ駆動ステージやHDD,圧延機等,様々な装置が2慣性系としてモデリングされ,制御されています。この汎用性から,20年以上前から研究がなされており,現在でも盛んに研究が行われています。2慣性系の制御では,モータと負荷を接続する低剛性な要素(減速機等)が励起する負荷の振動の抑制や,これらの要素に内在する非線形性を補償することが重要です。従来の2慣性系の制御の研究では,駆動側エンコーダ情報のみを用いた制御法が提案されてきましたが,本研究室では,産業界において負荷側にエンコーダを備える装置が増加してきていることを踏まえ,負荷側のエンコーダ情報を利用した新たな制御法を提案しております。 |
パワーエレクトロニクス
- PMモータの高速な弱め磁束制御
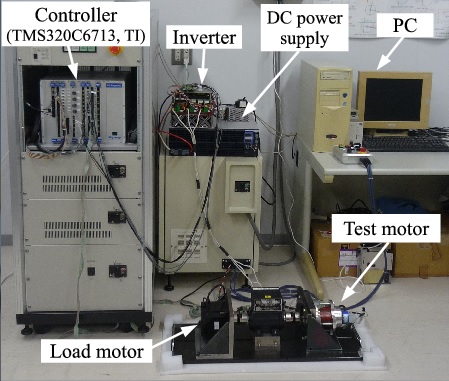 |
様々な産業機器に用いられているPMモータの問題の一つとして,インバータ入力電圧が低いシステムにおける出力電圧飽和があります。PMモータの出力電圧飽和により,従来は高速なトルク応答が困難となっていました。研究室では,極座標に基づいたPMモータの電圧振幅位相制御により,弱め磁束制御領域における高速な制御を実現しました。 |
- PMモータの音振動現象のモデル化及びその制御手法
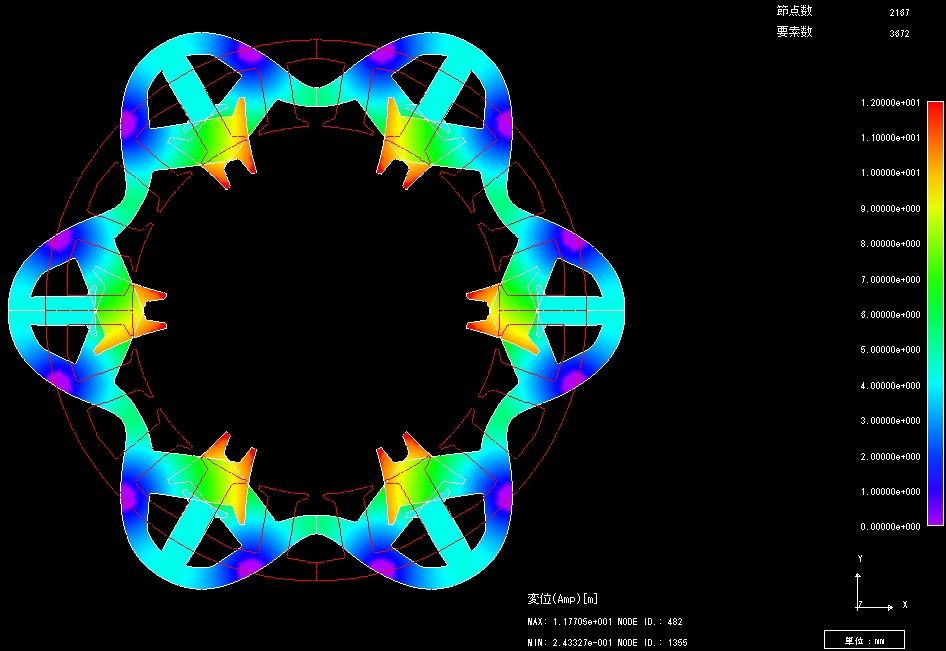 |
様々な産業機器に用いられているPMモータは,従来のエンジンなどには見られない高周波騒音が問題となっております。従来 は回転方向の電磁力脈動であるトルクリプルのみが研究対象となっておりましたが,本研究室では半径方向の電磁力脈動(ラジアル力)をモデル化し制御する手法の開発を行っております。今までに鎖交磁束や空間磁束分布という概念に着目することで直観的に理解しやすい新しい電磁力のモデル化を行ってきました。 |
- 昇圧コンバータの高応答電圧制御
ハイブリッド車等に用いられている昇圧コンバータは,負荷の大きさに応じて特性の大きく異なる連続導通モードと不連続導通モードで動作します。そのため,モードに応じた制御や,モード切り替わり時の制御が必要となります。研究室では,入力電流センサを用いない高応答な出力電圧制御系を設計し,不安定零点を考慮したフィードフォワード制御や,モード推定に基づく切り替え制御について研究しています。 |
航空・宇宙機制御・ロボティックス
航空・宇宙機制御・ロボティックスチームでは、電気飛行機や月面着陸機、ロボットなどの制御を行っています。
-電気飛行機

当研究室ではJAXA(調布)と共同で,電気自動車で培ったノウハウを基に電気飛行機の実用化に向けた基礎研究を行っています。 電気モータが有する優れた制御性に着目し,推力制御やプロペラ後流を利用した昇降速度制御など「落ちない飛行機」の実現を目指した研究を行ってきました。 |

また,電気飛行機には内燃機関型の航空機と比較してレイアウトの自由度が高いというメリットがあります。そこに着目して,可変ピッチプロペラのピッチ角の最適化や,複数の固定ピッチプロペラの推力配分の最適化による消費エネルギー低減の研究も行っています。 更に一人乗りの電気飛行機(FPEA1)の開発も行っており,まだ主翼はありませんが,学内の走行実験場などで滑走試験を行っています。 |
-宇宙機制御
JAXA宇宙科学研究所(相模原)と共同で月惑星着陸機の着陸脚の研究を行っております。着陸時の衝撃力を吸収する方法として、従来からアルミハニカムなどのパッシブな機構が多く用いられてきました。しかし、パッシブな機構ではその性能に限界があるだけでなく、地上試験で問題のないものを月面上で再度使用することができません。 当研究室では、ボールねじアクチュエータを持つ着陸脚とセンサを使い、脚をアクティブに制御することで着陸の際の衝撃力緩和と転倒を防ぐ研究しています。 |