サーボ系設計とモーションコントロール
藤本 博志(OB)
<現在の研究内容>
マルチレートサンプリング制御を用いた新しいディジタルモーションコントロールについて研究し、サーボモータやハードディスクに適用している。
藤本のページへ
馬 澄斌(D2)
<研究内容>
非整数次制御を用いた新しいモーションコントロールの研究
馬のページへ
坂東 信尚(D2)
<現在の研究内容>
加速度センサからの伝達特性に外部外乱抑圧制御器の磁気ディスク装置への応用
坂東のページへ
張 炳勳(D1)
<現在の研究内容>
高速高精度位置決め制御のための加速度変化率の微分値を考慮した目標軌道設計法
張のページへ
呉 俊徳(M2)
<研究内容>
サンプル点間予測期によって座標変換の干渉問題を解決した高速ビジュアルサーボ系の研究
呉のページへ
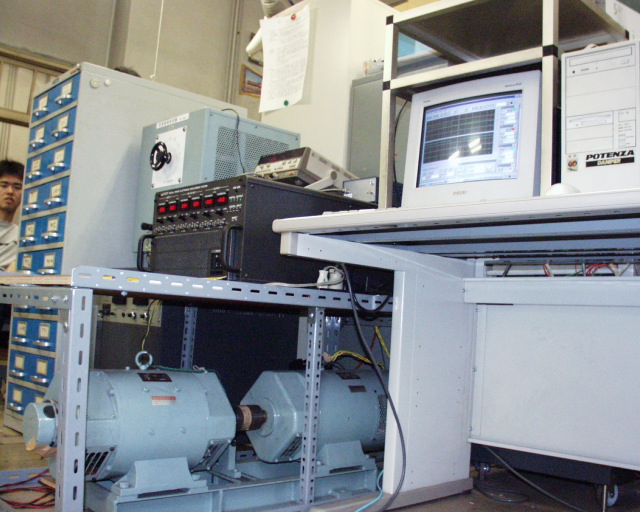
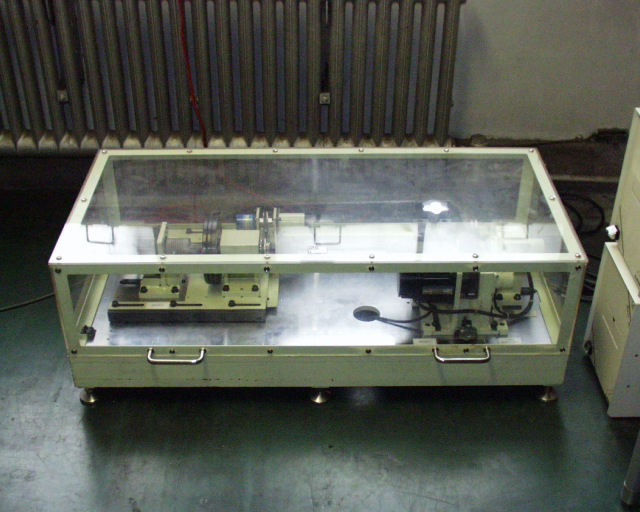
実験機
サーボチームでは下のような実験機を使って研究を行っています。